
MVP 矩阵
什么是MVP矩阵?
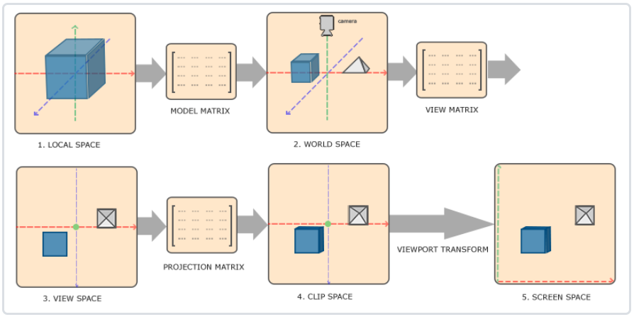
MVP矩阵分别是模型(Model),观察(View),投影(Projection)三个矩阵。我们的顶点坐标起始于局部空间(Local Space),在这里它称为局部坐标(Local Coordinate),它在之后会变为世界坐标(World Coordinate),观察坐标(View Coordinate),裁剪坐标(Clip Coordinate),并最后以屏幕坐标(Screen Coordinate)的形式结束
M矩阵:模型空间 → 世界空间的转换矩阵
模型空间是以自身中心为原点的空间坐标系
在不同的建模软件或者游戏引擎中使用的坐标系是不一样的,比如OpenGL使用的的右手坐标系,DirectX 使用的是左手坐标系
两种坐标系怎么区分呢?正 x 轴指向右面,正 y 轴指向上面。通过沿正 x 轴方向到正 y 轴方向握拳,大拇指的指向就是相应坐标系统的正 z 轴的指向。在握拳的过程中,如果是顺时针方向就是左手坐标系,如果是逆时针方向就是右手坐标系。在 Unity 中使用的是左手坐标系
从模型空间变换到世界空间:
- 第一步进行了缩放
-
第二步进行了旋转
-
第三步进行了平移
$$P_{new}=M_{translation}M _{rotation}M_{scal}P_{old}$$
一个三维场景中的各个模型一般需要各自建模,再通过坐标变换放到一个统一的世界空间的指定位置上,这个过程再3D图形学称作 “世界变换”,实际变换有三种,平移、旋转和缩放(实际上还有不常用的的扭曲和镜像,他们不是仿射变换),这三种变换按各种顺序执行,结果是不同的。可是实际的应用中一 般按照 缩放 → 旋转 → 平移的顺序进行。这样做的原因是可以获得最符合常理的变换结果。
比方说,通过世界变换希望获得的结果可能是:将一个放在原点的物体(比如说可乐罐)移动到(30,50),让它自身倾斜 45° ,再放大 2 倍
而不希望的结果是:和本地坐标轴成角度的缩放(会导致扭曲,像踩扁的可乐罐)绕自己几何中心以外位置的原点的旋转(地球公转式)和缩放
而颠倒了上述变换顺序就会得到这样不自然的结果。具体地说:当缩放在旋转之后进行时,会发生现象一。当缩放和旋转在平移之后进行时会发生现象二。
这时因为:在物体刚刚放入世界坐标系的时候使用的是本地坐标,也就是本地和全局坐标系的原点和坐标轴都是重合的(当然两者分别使用了左右手坐标系除外,那是BUG),此时所有物体都“把世界坐标系当做自己的本地坐标系”
而经过坐标变换后:
缩放变换不改变坐标轴的走向,也不改变原点的位置,所以两个坐标系仍然重合
旋转变换改变坐标轴的走向,但不改变原点的位置,所以两个坐标系坐标轴不再处于相同走向
平移变换不改变坐标轴走向,但改变原点位置,两个坐标系原点不再重合
所以我们需要先进行缩放,再旋转,在平移,如上节所说的那样,完全可以将缩放矩阵,旋转矩阵,平移矩阵进行矩阵乘法计算,获得最后的复合变换矩阵 P_{new}=M_{CompositeTransform}P_{old} ,这样计算也不会影响最终结果。
顶点坐标从模型坐标变换到世界坐标
M_{CompositeTransform}=\begin{bmatrix}1&0&0&t_x\\0&1&0&t_y\\0&0&1&t_z\\0&0&0&1\end{bmatrix}_{translation}\begin{bmatrix}\cos\theta&-\sin\theta&0&0\\\sin\theta&\cos\theta&0&0\\0&0&0&0\\0&0&0&1\end{bmatrix}_{rotation}\begin{bmatrix}x&0&0&0\\0&y&0&0\\0&0&z&1\\0&0&0&1\end{bmatrix}_{scale}
V 矩阵:世界空间 → 视觉空间的转换矩阵
视觉空间是以摄像机中心为原点的空间坐标系,在视觉空间中使用的是右手坐标系
平移整个观察空间,摄像机原点和世界坐标原点重合,坐标轴重合,也就是将观察空间坐标系平移到世界空间坐标系,让两个空间坐标系重合,就可以求出这个 View 变换矩阵
因为摄像机是在世界空间中是先旋转,再平移,为了让摄像机与世界坐标重合,所以我们需要逆变换
如何进行逆变换?
先进行平移,再进行旋转,最后对 Z 分量取反(因为世界空间坐标系是左手坐标系,而视觉空间的坐标系是右手坐标系,所以我们需要对 Z 分量进行取反),即
V_{view}=\begin{bmatrix}1&0&0&0\\0&\cos\theta&-\sin\theta&0\\0&\sin\theta&\cos\theta&0\\0&0&0&1\end{bmatrix}\begin{bmatrix}1&0&0&t_x\\0&1&0&t_y\\0&0&1&t_z\\0&0&0&1\end{bmatrix}
P矩阵:视觉空间 → 裁剪空间
- 不是真正的投影,为投影做准备。
-
目的:判断顶点是否在可见范围内。
-
P矩阵:对 x,y,z 分量进行缩放,用 w 分量做范围值。如果 x,y,z 都在 w 范围内,那么该点在裁剪空间内。
透视投影
透视投影是符合我们人眼视觉的投影,即近大远小
透视矩阵推导
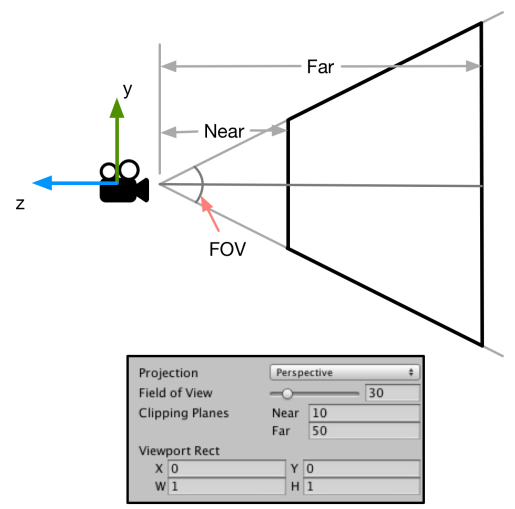
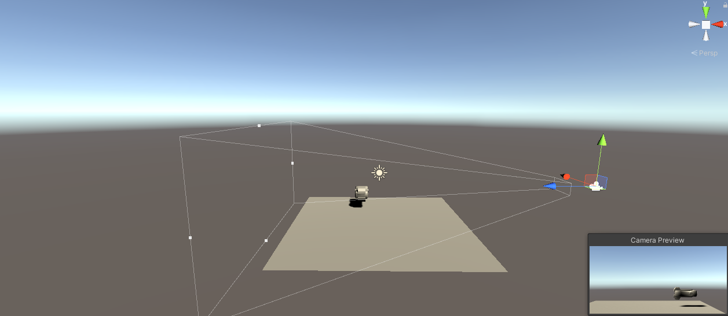
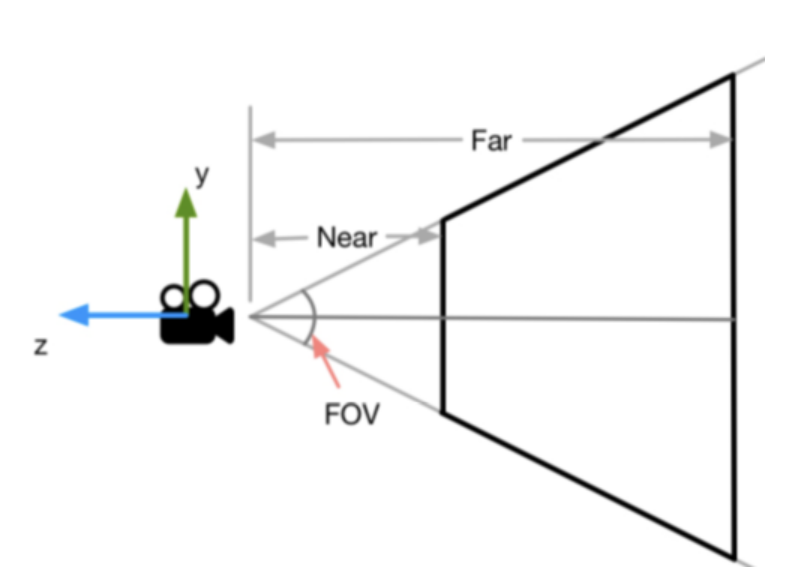
由图像可知,在 Camera 组件中,可以通过 Field of View(简称 FOV)属性来改变视锥体竖直方向的张开角度,而 Clipping Planes 中的 Near 和 Far 参数可以控制视锥体的近裁剪平面和原裁剪平面距离摄像机的远近。这样我们可以求出视锥体近裁剪平面和原裁剪平面的高度,也就是
\text{nearClipPlaneHeight}=2\cdot Near\cdot\tan\dfrac{FOV}{2}\\
\text{farClipPlaneHeight}=2\cdot Far\cdot\tan\dfrac{FOV}{2}
利用三角函数得到,前面也说 Fov 是视锥体竖直方向的张开角度,想要求出视锥体近裁剪平面的高度 Near 为已知,且是三角形的其中一个直角边,三角形直角边对边比邻边是 \tan ,原公式为
\dfrac{\dfrac{\text{nearClipPlaneHeight}}{2}}{Near}=\tan\dfrac{Fov}{2}
而这仅仅是近裁剪平面的一半,所以我们需要乘 2。
即
\dfrac{\text{nearClipPlaneHeight}}{2\cdot Near}=\tan\dfrac{Fov}{2}
通过移项,得到最后的公式
\text{nearClipPlaneHeight}=2\cdot Near\cdot \tan\dfrac{Fov}{2}
这也同样适用在原裁剪平面高度,以相同的方法获得最终的原裁剪平面高度。
就这样,我们可以求出视锥体近裁剪平面和原裁剪平面的高度
但是到现在我们还缺乏横向的信息。这也可以通过摄像机的横纵比得到。在 Unity 中,一个是摄相机的横纵比由 Game 试图的横纵比和 Viewport Rect 的 W 和 H 属性共同决定,假设,当前摄像机的横纵比为 Aspect,可以得到定义的公式
Aspect=\dfrac{\text{nearClipPlaneWidth}}{\text{nearClipPlaneHeight}}\\
Aspect=\dfrac{\text{farClipPlaneWidth}}{\text{farClipPlaneHeight}}
摄相机的横纵比由 Game 视图的横纵比和 Viewport Rect 的 W 和 H 属性共同决定,所以可知 \dfrac{W}{H}=Aspect
我们得到近裁剪平面等式关系,联立方程得
\left\{\begin{matrix}\dfrac{\text{nearClipPlaneWidth}}{\text{nearClipPlaneHeight}}=Aspect\\\dfrac{W}{H}=Aspect\end{matrix}\right.
最终得到关系式
W=\text{nearClipPlaneWidth}\newline
H=\text{nearClipPlaneHeight}
前面我们又得到 \text{nearClipPlaneHeight} 方程,所以方程联立得到
\left\{\begin{matrix}H=\text{nearClipPlaneHeight}\\2\cdot Near\cdot \tan\dfrac{Fov}{2}=\text{nearClipPlaneHeight}\end{matrix}\right.
最后得到 H 与 2\cdot Near\cdot \tan\dfrac{Fov}{2} 之间的等式关系,即
H=2\cdot Near\cdot \tan\dfrac{Fov}{2}
同理,可得
W=2\cdot Aspect \cdot Near\cdot \tan\dfrac{Fov}{2}
我们来画一张图
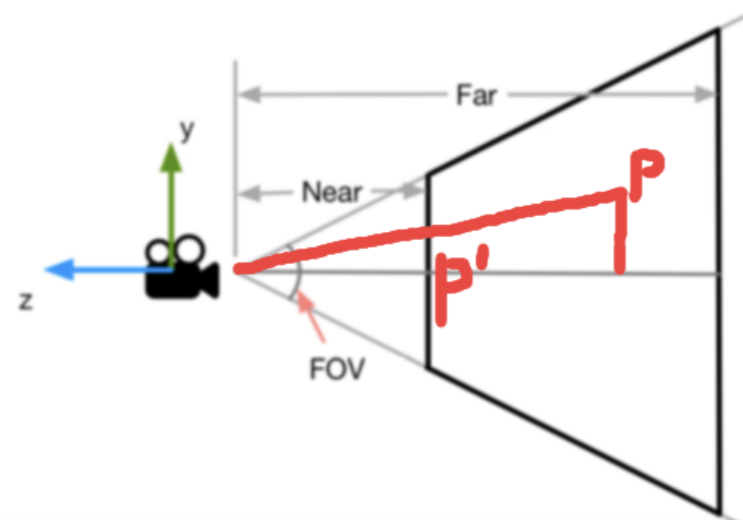
在这张图中有两点,P 与 P’ ,假设 P 坐标是 (x,y,z),那么求的近裁剪平面的 P’ 坐标是 (x’,y’,z’),那么问题来了,P’ 怎么求呢。?
如图,我们知道这是一个相似三角形。对于相似三角形我们有定律
\dfrac{x}{x’}=\dfrac{y}{y’}=\dfrac{z}{z’}
P’ 的 z’ 我们已知,因此可得方程
\left\{\begin{matrix}x’=x\cdot \dfrac{Near}{z}\qquad x’\in{-\dfrac{W}{2},\dfrac{W}{2}}\\y’=y\cdot \dfrac{Near}{z}\qquad x’\in{-\dfrac{H}{2},\dfrac{H}{2}}\end{matrix}\right.
我们把范围定义在 [-1,1] 之间,由于 x’,y’ 关于原点对称,所以只要分别除以 \dfrac{W}{2},\dfrac{H}{2} 转换到 [-1,1] 空间计算即可。
可得
\left\{\begin{matrix}x”=\dfrac{2x\cdot Near}{z\cdot W}\\y”=\dfrac{xy \cdot Near}{z\cdot H}\end{matrix}\right.
我们带入 W 和 H 的公式,最后得到方程组
\left\{\begin{matrix}x”=\dfrac{2x\cdot Near}{z\cdot 2\cdot Aspect \cdot Near\cdot \tan\dfrac{Fov}{2}}\\y”=\dfrac{xy \cdot Near}{z\cdot 2\cdot Aspect \cdot Near\cdot \tan\dfrac{Fov}{2}}\end{matrix}\right.
化简得
\left\{\begin{matrix}x”=\dfrac{x}{z\cdot Aspect\cdot \tan\dfrac{Fov}{2}}\\y”=\dfrac{y}{z\cdot \tan\dfrac{Fov}{2}}\end{matrix}\right.
有的人可能会在不同的资料书上看到的公式是这样
\left\{\begin{matrix}x”=\dfrac{x\cot\dfrac{Fov}{2} }{z\cdot Aspect}\\y”=\dfrac{y\cdot \cot\dfrac{Fov}{2}}{z}\end{matrix}\right.
没关系,这是正确的,只是表达方式不一样,但是所要表达的内容是完全一样的。\cot 余切函数,在现在的三角形函数知识中,余切函数就不怎么讲了,在这里补充一下
\cot 和 \tan 的关系:\tan\theta \cdot \cot\theta = 1。在三角函数中,\cot\theta = \dfrac{\cos\theta}{\sin\theta},当\theta\not= k\Pi,k\in Z时,\cot\theta =\dfrac{1}{\tan\theta},当 \theta = k\Pi,k\in Z 时,\cot\theta不存在
\cot\dfrac{FOV}{2}=\dfrac{1}{\tan\dfrac{FOV}{2}}
假设 z” \in [-1,1]
所以最后得到的 p” 的坐标为 (\dfrac{x\cdot\cot\dfrac{FOV}{2}}{z\cdot Aspect},\dfrac{y\cdot\cot\dfrac{FOV}{2}}{z},z”),至此变换后的坐标我们求出了,接下来开始求透视投影转换矩阵。
我们已知 原点 P 的坐标为 (x,y,z),因为要进行矩阵转换,所以我们需要进行齐次坐标处理,将原点 P 提升一个维度增加 w 轴,即最后 P 点坐标是 (x,y,z,1)。
这里我们为什么要把 w 取 1。
因为要使线性变换的结果的 x 分量和 y 分量 z 分量,分别偏移 tx,ty 和 tz ,只有令w=1,才能得到正确的结果。
所以开始计算投影矩阵….但在那之前,先来回顾一下,4*4 矩阵与 4*1 矩阵计算我们最后得到什么矩阵?
没错,我们会得到 4*1 矩阵,因此得到
\begin{bmatrix}
m_{00} &m_{01}&m_{02}&m_{03}\\
m_{10} &m_{11}& m_{12}& m_{13}\\
m_{20} &m_{21}&m_{22}&m_{23}\\
m_{30}&m_{31}&m_{32} &m_{33}
\end{bmatrix}
\begin{bmatrix}
x\\
y \\
z \\
1
\end{bmatrix}=
\begin{bmatrix}
\dfrac{x\cdot\cot\dfrac{FOV}{2}}{z\cdot Aspect}\\
\dfrac{y\cdot\cot\dfrac{FOV}{2}}{z} \\
z^n \\
1
\end{bmatrix}
然后我们得到方程
m_{00}x+m_{01}y+m_{02}z+m_{03}=\dfrac{x\cot\dfrac{FOV}{2}}{z\cdot Aspect}
那么问题来了,左边的 m_{00} 和 m_{02} 如何赋值?
很简单,只需要我们把右边的向量矩阵乘个 z 就很简单了,即
\begin{bmatrix}
m_{00} &m_{01}&m_{02}&m_{03}\\
m_{10} &m_{11}& m_{12}& m_{13}\\
m_{20} &m_{21}&m_{22}&m_{23}\\
m_{30}&m_{31}&m_{32} &m_{33}
\end{bmatrix}
\begin{bmatrix}
x\\
y \\
z \\
1
\end{bmatrix}=
\begin{bmatrix}
\dfrac{x\cdot\cot\dfrac{FOV}{2}}{Aspect}\\
y\cdot\cot\dfrac{FOV}{2} \\
z^{n+1} \\
z
\end{bmatrix}
最终我们解方程得到
\begin{bmatrix}
\dfrac{\cot\dfrac{FOV}{2}}{Aspect} &0&0&0\\
0 &\cot\dfrac{FOV}{2}&0&0\\
0 &0&m_{22}&m_{33}\\
0 &0&1&0
\end{bmatrix}
然后得到
m_{22}\cdot z +m_{23}=z^{n+1}
当 z = Near 时,z” = -1,当 z = Far 时, z” = 1。
z” 的值怎么来的?
我们假设了 z”∈[-1,1] 当 z 取 Near 的时候,z” 是最小值即为-1,当 z 取 Far 的时候,z” 是最大值即为 1
所以联立方程组
\left\{\begin{matrix}
m_{22}+\dfrac{m_{23}}{Near}=-1\\
m_{22}+\dfrac{m_{23}}{Far}=1
\end{matrix}\right.
最后得到 m_{22} 与 m_{23} 的值为
\left\{\begin{matrix}
m_{22}=-\dfrac{Far-Near}{Near-Far}\\
m_{23}=\dfrac{2\cdot Near \cdot Far}{Near- Far}
\end{matrix}\right.
到此透视矩阵推导完成,最后的结果为
P_{frustTurn}=\begin{bmatrix}
\dfrac{\cot\dfrac{FOV}{2}}{Aspect} &0&0&0\\
0 &\cot\dfrac{FOV}{2} &0&0\\
0 &0&-\dfrac{Far-Near}{Near-Far}&\dfrac{2\cdot Near \cdot Far}{Near-Far} \\
0 &0 &1 &0
\end{bmatrix}
这是对于 OpenGL 的透视矩阵结果,因为OpenGL要求 w 的取值范围是 [-w,w],但是对于 DirectX 这种图形接口,还需要对以上透视矩阵进行额外的处理,因为在 DirectX 窗口中要求的 w 的取值范围是 [0,w],这边不再讨论。
正交投影
被投影的的物体没有远近之分,即正交视图
模型空间,世界空间,观察空间的区别
模型空间
模型空间是和某个模型或者说是对象有关的。有时模型空间也被称为对象空间或局部空间。每个模型都有自己独立的坐标空间,当它移动或旋转的时候,模型空间也会跟着它移动和旋转。比如自己的游戏模型,我们移动的时候我们的模型空间也在跟着移动,我们转身时本身的前后左右方向也跟着改变。
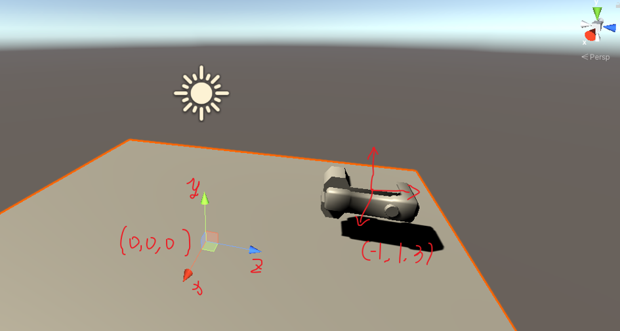
世界空间
世界空间是一个特殊的坐标系,因为它建立了我们所关心的最大的空间。世界空间可以被用于描述绝对位置(这里指的是世界坐标系中的位置),通常我们把世界空间的原点放置在游戏空间的中心。
在 Unity 中,除了观察空间(摄像机空间),所有的空间坐标系都是使用的左手坐标系。很多的效果都是要在世界空间中完成的,比如说我们想要让一个物体有凹凸感觉。简单而言我们想要让一个物体表面生成凹凸的感觉,我们可以使用两种贴图,一种法线贴图,一种高度图进行空间转换,在世界空间中与物体的原贴图进行混合
观察空间(摄像机空间)
最大的区别在于在观察空间中我们使用的是右手坐标系,而这个是符合OpenGL的,在观察空间中我们需要把世界空间的顶点转换到观察空间,为此我们需要求的观察空间的变换矩阵,因为坐标系的不同,所以我们需要对z轴取反,并求得逆变换,
在观察空间还有一项就是需要将观察空间的顶点转换到裁剪空间(也被称为齐次裁剪空间),这个用于变换的矩阵叫做裁剪矩阵,也被称为投影矩阵,在观察空间中并不是真正的投影,而是准备投影的数据,即那些顶点需要保留,那些需要剔除,这是由投影方式决定的