
3D 变换
平移
T(t_x,t_y,t_z)=\begin{pmatrix}
1 & 0&0 &t_x \\
0 &1&0&t_y\\
0 &0 &1 &t_z \\
0 &0 &0 &1
\end{pmatrix}
缩放
S(s_x,s_y,s_z)=\begin{pmatrix}
s_x & 0&0 &0 \\
0 &s_y&0&0\\
0 &0 &s_z &0 \\
0 &0 &0 &1
\end{pmatrix}
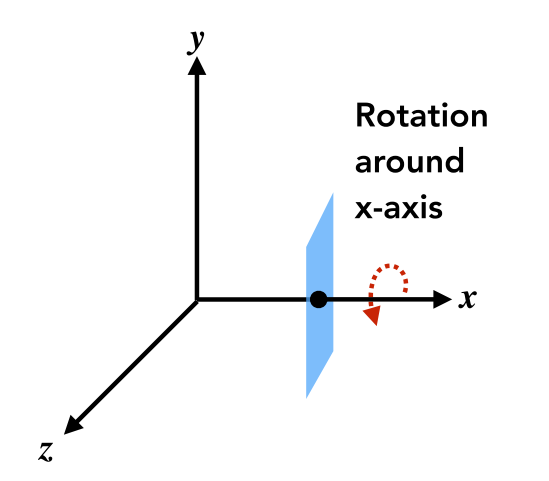
旋转
R_x(\alpha)=\begin{pmatrix}
1 & 0&0 &0 \\
0 &\cos\alpha&-\sin\alpha&0\\
0 &\sin\alpha &\cos\alpha &0 \\
0 &0 &0 &1
\end{pmatrix}\\
R_y(\alpha)=\begin{pmatrix}
\cos\alpha & 0&\sin\alpha &0 \\
0 &1&0&0\\
-\sin\alpha &0 &\cos\alpha &0 \\
0 &0 &0 &1
\end{pmatrix}\\
R_z(\alpha)=\begin{pmatrix}
\cos\alpha & -\sin\alpha&0 &0 \\
\sin\alpha &\cos\alpha&0&0\\
0 &0 &1 &0 \\
0 &0 &0 &1
\end{pmatrix}
3D 旋转变换矩阵遵循循环对称:X\times Y=Z,Y\times Z=X,Z\times X=Y
合成的旋转变换
R_{xyz}(\alpha,\beta,\gamma)=R_x(\alpha)R_y(\beta)R_z(\gamma)
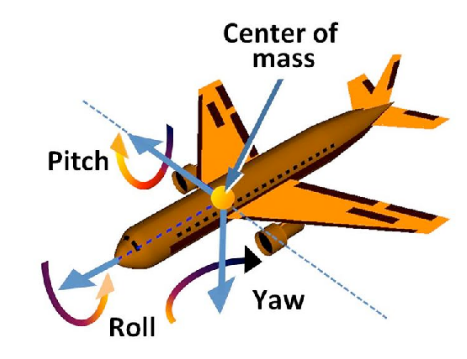
- 称为“欧拉角”
- 常用于飞行模拟器:roll、pitch、yaw
罗德里格斯旋转公式
绕旋转轴 n 旋转 \alpha 角度
R(n,\alpha)=\cos(\alpha)I+(1-\cos(\alpha))nn^T+\sin(\alpha)N\\
N=\begin{pmatrix}
0 & -n_z&n_y \\
n_z &0&-n_x\\
-n_y &n_x &0 \\
\end{pmatrix}
四元数:旋转与旋转之间的差值
推导过程
- 对 v 做正交分解,得:v=v_\parallel+v_\perp
-
由向量的矢量投影公式,得:v_\parallel=(v\cdot k)\cdot k
-
由 ① 和 ② ,得:v_\perp=v-v_\parallel=v-(v\cdot k)\cdot k
-
$\because$ $k,v_\perp$ 与 $w$ 两两垂直,且 $|w|=|v_\perp|$
$\therefore$ 由向量积得
\begin{aligned}
w=k\times v_\perp&=k\times [v-(v\cdot k) k]\\
&=k\times v-k\times (v\cdot k) k \\
&= k\times v-k\times v_\parallel
\end{aligned}
\because k 与 v_\parallel 共线\therefore w=k \times v
-
$v_\perp$ 旋转 $\theta$ 角后得到 $v_{rot\perp}$
将 $v_{rot\perp}$ 正交分解,得:$v_{rot\perp}=a+b$
$a=v_{rot\perp}\times \cos(\theta-90^\circ)=v_{rot\perp}\times \cos,a=w\sin\theta$
$b=v_{rot\perp}\times \cos(180^\circ-\theta)=v_{rot\perp}\times \cos,b=v_\perp\cos\theta$
$\therefore v_{rot\perp}=a+b=w\sin\theta+v_{rot\perp}\cos\theta=\sin\theta k\times v + \cos \theta[v-(v\cdot k) k]$
-
有\begin{aligned}
v_{rot}=v_\parallel+v_{rot\perp}&=(v\cdot k)+\sin\theta k\times v+\cos\theta[v-(v\cdot k)k]\\
&=(v\cdot k)k+\sin\theta k\times v + \cos\theta v-\cos\theta(v\cdot k)k\\
&=\cos\theta v+(1-\cos\theta)(v\cdot k)k+\sin\theta k\times v
\end{aligned} -
将得到的结果变为矩阵的形式:
- 推导,得:v_{rot}=\cos\theta v+(1-\cos\theta)(v\cdot k)k+\sin\theta k\times v
把 k 和 v 分别写作列向量:
k=\begin{pmatrix}
k_x \\k_y \\k_z
\end{pmatrix}
v=\begin{pmatrix}
v_x \\v_y \\v_z
\end{pmatrix}
令 v_{rot}=Rv,下面对 R 进行计算 -
$(v\cdot k)k=k(v\cdot k)=k(k^T\cdot v)$
-
$k\times v =\begin{pmatrix}k_y v_z-k_z v_y \\k_zv_x-k_xv_z \\k_xv_y-k_yv_x\end{pmatrix}=\begin{pmatrix}0&-k_z&k_y\\k_z&0&-k_x\\-k_y&k_x&0\end{pmatrix}\begin{pmatrix}v_x \\v_y \\v_z\end{pmatrix}$
-
$\therefore\ R=I\cos\theta+(1-\cos\theta)\begin{pmatrix}k_x\\k_y \\k_z\end{pmatrix}\begin{pmatrix}k_x&k_y&k_z\end{pmatrix}+\sin\theta\begin{pmatrix}0&-k_z&k_y\\k_z&0&-k_x\\-k_y&k_x&0\end{pmatrix}$
其中 $I$ 为 $3\times 3$ 的单位矩阵
- 推导,得:v_{rot}=\cos\theta v+(1-\cos\theta)(v\cdot k)k+\sin\theta k\times v
如何将三维变成二维并在屏幕上显示出来
- 模型变换 (M)
- 相机变换 (V)
- 投影变换 (P)
相机的定义
- 位置 \vec{e}
- 视线方向 \hat{g}
- 垂直方向 \hat{t}

如果把摄像机和世界一起变换,那么照片是一样的,所以把摄像机变换到新坐标系的原点,其他所有物体也做同样的变换
TEG 坐标系怎么转变为 XYZ 坐标系
M_{view}=R_{view}T_{view}
- 先做平移,T_{view}=\begin{bmatrix} 1&0&0&-x_e\\ 0&1&0 &-y_e \\ 0& 0&1 &-z_e \\ 0&0&0 &1\end{bmatrix}
-
再做旋转,顺着思路要把 \hat{g} 旋转到 -Z 坐标轴,把 \hat{t} 旋转到 Y 坐标轴,把 (g\times t) 旋转到 X 坐标轴,但这样的旋转矩阵非常难写
-
所以采用逆向思路,把坐标轴移到相机坐标轴,通过逆操作写(该旋转矩阵为正交矩阵,其逆矩阵就是它的转置矩阵)(基变换)
R^{-1}_{view}=\begin{bmatrix} x_{\hat{g}\times \hat{t}}&x_t&x_{-g}&0\\ y_{\hat{g}\times\hat{t}}&y_t&y_{-g} &0 \\ z_{\hat{g}\times\hat{t}}&z_t&z_{-g} &0 \\ 0&0&0 &1\end{bmatrix}\\
R_{view}=\begin{bmatrix} x_{\hat{g}\times \hat{t}}&y_{\hat{g}\times\hat{t}}&z_{\hat{g}\times\hat{t}}&0\\ x_t&y_t&z_t &0 \\ x_{-g}&y_{-g}&z_{-g} &0 \\ 0&0&0 &1\end{bmatrix}\\
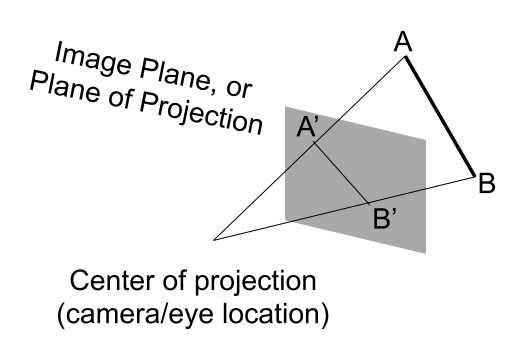
投影变换
计算机图形学中的投影
- 3D 转 2D
- 正交投影
- 透视投影
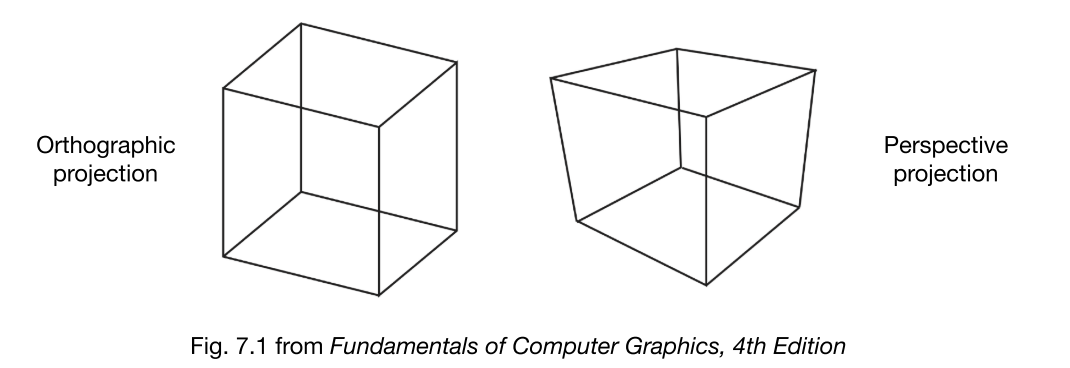
透视投影与正交投影

正交投影
- 相机位于原点,面向 -Z,上方是 Y
- 忽略 Z 坐标
- 将生成的矩形平移并缩放为 [-1, 1]^2

- 相机位置无限远,没有远近概念(忽略深度信息)
-
步骤:先做平移,再做缩放,目的是把投影全塞在 [-1,1]^3 的长方体内
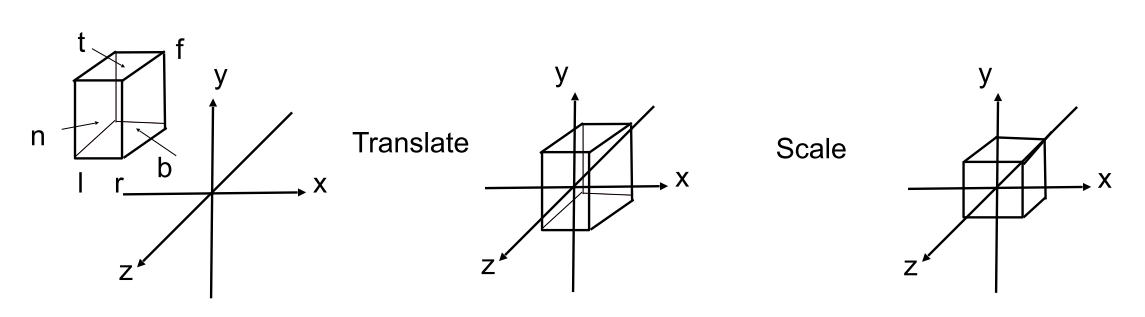
M_{ortho}=\begin{bmatrix} \dfrac{2}{r-l}&0&0&0\\ 0&\dfrac{2}{t-b}&0 &0 \\ 0&0&\dfrac{2}{n-f} &0 \\ 0&0&0 &1\end{bmatrix}\begin{bmatrix} 1&0&0&-\dfrac{r+l}{2}\\ 0&1&0 &=\dfrac{t+b}{2} \\ 0&0&1 &-\dfrac{n+f}{2} \\ 0&0&0 &1\end{bmatrix}
- 沿着 -Z 使远近不直观(n > f)
- 仅供参考:这就是 OpenGL 使用左手坐标的原因。
透视投影
- 最常见于计算机图形学、艺术、视觉系统
- 近大远小
- 平行线不平行; 收敛到单点
推导过程
正交投影矩阵的视锥体是一个四棱锥的一部分,其中近平面为 z=n,远平面为z=f,我们要把这个视锥体转换到一个正方体[-1,1][-1,1][-1,1] 中,可以先把远平面压缩,把视锥体压缩成一个长方体,然后再通过第二步中的正交投影矩阵就可以变换到正方体中,如图。
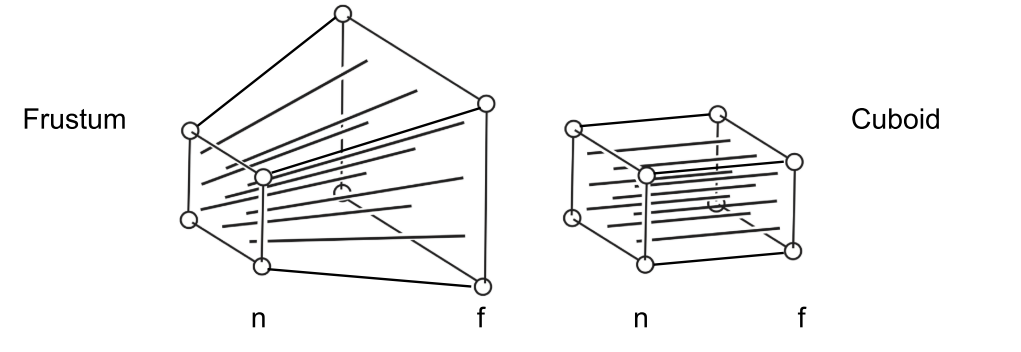
在把视锥体压缩成长方体的过程中,我们规定三个原则
- 近平面的所有点坐标不变
-
远平面的所有点坐标 z 值不变 都是 f
-
远平面的中心点坐标值不变 为 (0,0,f)

然后我们假设视锥体内的任意一点 (x,y,z),压缩以后的 xy 坐标应该与近平面上对应的点相同,如图解相似三角形可以得到 y\rightarrow ny/z,x\rightarrow nx/z
故对于(x,y,z,1)一点,它在视锥体压缩以后坐标应该为(nx/z,ny/z,unknow,1)。
z 值我们还不知道,这里先不讨论。
\begin{pmatrix}
x \\ y \\ z \\ 1
\end{pmatrix}\Rightarrow\begin{pmatrix}
nx/z \\ ny/z \\ \text{unknown} \\ 1
\end{pmatrix}
也就是我们现在需要找到一个矩阵 \text{Mpersp}\rightarrow\text{ortho},使得上面的转换成立。
假设矩阵的第一行为 A,B,C,D。可以得到等式 Ax+By+Cz+D = nx/z。
然后我们发现这个等式好像很难求,如果让 A = n/z,其他等于0,的确可以得到结果。
但是矩阵的值应该是常数,n/z是个变量。
而其他的结果也很难写出来,同时矩阵的第二行也会有同样的问题 Ex+Fy+Gz+H = ny/z,也很难求。
所以我们换一种方法,前面根据已学知识可以知道(x,y,z,1)与(kx,ky,kz,k\not=0)这两个点是完全等价的点,
所以我们让k取z可以把坐标(nx/z,ny/z,unknow,1)变为(nx,ny,\text{still unknow},z)。
M_{presp\rightarrow ortho}^{(4\times 4)}\begin{pmatrix}
x \\ y \\ z \\ 1
\end{pmatrix}=\begin{pmatrix}
nx \\ ny \\ \text{unknown} \\ z
\end{pmatrix}
也就是我们需要找到矩阵 \text{Mpersp}\rightarrow\text{ortho},使得上面的转换成立。
现在就变简单了,Ax+By+Cz+D = nx,求出 A=n,B=C=D=0
Ex+Fy+Gz+H = ny,求出 F=n,E=G=H=0
Mx+Ny+Oz+P = z,求出 O=1,M=N=P=0。
M_{presp\rightarrow ortho}\begin{pmatrix}
n&0&0&0 \\ 0&n&0&0 \\ ?&?&?&? \\ 0&0&1&0
\end{pmatrix}
于是,我们求出了矩阵的其中三行,只剩下第三行是未知的。
然后我们想下之前的三个原则,其中一个,近平面的所有点坐标不变。
也就是点 (x,y,n,1) 通过矩阵 \text{Mpersp}\rightarrow\text{ortho} 变换后,应该还是等于 (x,y,n,1)。
\begin{pmatrix}n &0&0 &0 \\0 &n&0&0\\? &? &? &? \\0 &0 &1 &0\end{pmatrix}*\begin{pmatrix}x\\y\\n\\1\end{pmatrix}=\begin{pmatrix}x\\y\\n\\1\end{pmatrix}
对于第一二四行,我们写出等式
nx+0y+0n+0_1=x\\
0x+ny+0n+0_1=y\\
0x+0y+1n+0*1=1\\
很明显这是有问题的,因为 n 应该是任意常数,但是现在只有在 n 等于 1 时,一二四行的运算才成立
所以我们根据前面的方法,再把 (x,y,n,1) 都乘以一个 n 等价变为 (nx,ny,n*n,n)。
这样转换就变成了
\begin{pmatrix}
n &0&0 &0 \\
0 &n&0&0\\
? &? &? &? \\
0 &0 &1 &0
\end{pmatrix}*\begin{pmatrix}
x\\y\\n\\1
\end{pmatrix}=\begin{pmatrix}
nx\\ny\\n*n\\n
\end{pmatrix}
对于第一二四行,我们写出等式
nx+0y+0n+0_1=nx\\
0x+ny+0n+0_1=ny\\
0x+0y+1n+0*1=n\\
完美成立。现在我们可以安心的求第三行了。
设第三行的四个数分别为 ABCD
可以获得等式 Ax+By+Cn+D = n*n。
明显 A=0,B=0,Cn+D = n*n ①
我们接下来考虑第三个原则,远平面的中心点坐标值不变 为(0,0,f)
同样为了保证之前求的矩阵一二四行成立,我们需要把 (0,0,f,1) 写成 (0,0,f*f,f)
\begin{pmatrix}
n &0&0 &0 \\
0 &n&0&0\\
? &? &? &? \\
0 &0 &1 &0
\end{pmatrix}*\begin{pmatrix}
0\\0\\f\\1
\end{pmatrix}=\begin{pmatrix}
0\\0\\f*f\\f
\end{pmatrix}
Cf+D = f*f ②
联立 ①②,解得:C = n+f,D = -nf
终于,我们求得了 \text{Mpersp}\rightarrow\text{ortho} 矩阵为
\begin{pmatrix}
n &0&0 &0 \\
0 &n&0&0\\
0 &0 &n+f &-nf \\
0 &0 &1 &0
\end{pmatrix}
也就是通过这个矩阵,我们可以把原来的透视投影的视锥体压缩为正交投影的视锥体(长方体)
最后我们再乘上一开始求出来正交投影矩阵 \text{Morth} 就得到了透视投影矩阵:\text{Mpersp} = \text{Mortho}*\text{Mpersp}\rightarrow\text{ortho}
\begin{pmatrix}2/(r-l)&0&0 &0 \\0 &2/(t-b)&0&0\\0 &0 &2/(n-f) &0 \\0 &0 &1 &1\end{pmatrix}*\begin{pmatrix}1&0&0 &-(l+r)/2 \\0 &1&0&-(b+t)/2\\0 &0 &1 &-(f+n)/2 \\0 &0 &0 &1\end{pmatrix}=\begin{pmatrix}n&0&0 &0 \\0 &n&0&0\\0 &0 &n+f &0 \\0 &0 &1 &0\end{pmatrix}